Modulacja to nieliniowy proces elektryczny, w którym parametry jednego sygnału (nośnej) są zmieniane za pomocą innego sygnału (modulacja, informacja). W technologii komunikacyjnej szeroko stosuje się modulację częstotliwości, amplitudy i fazy. W energoelektronice i technologii mikroprocesorowej modulacja szerokości impulsu stała się powszechna.
Zawartość
Co to jest PWM (modulacja szerokości impulsu)
Dzięki modulacji szerokości impulsu oryginalnego sygnału amplituda, częstotliwość i faza oryginalnego sygnału pozostają niezmienione. Czas trwania (szerokość) impulsu prostokątnego może ulec zmianie pod wpływem sygnału informacyjnego. W angielskiej literaturze technicznej jest skrótem PWM - modulacja szerokości impulsu.
Jak działa PWM
Sygnał modulowany szerokością impulsu jest tworzony na dwa sposoby:
- analog;
- cyfrowy.
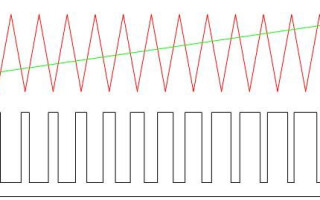
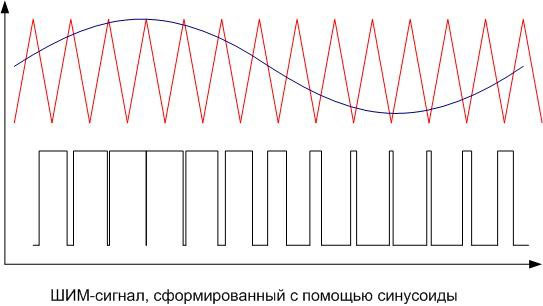
Analogową metodą tworzenia sygnału PWM nośnik w postaci sygnału piłokształtnego lub trójkątnego podawany jest na odwracający wejście komparatora, oraz informacje - o nieodwracaniu. Jeśli chwilowy poziom nośnej jest wyższy niż sygnał modulujący, to wyjście komparatora wynosi zero, jeśli niższy - jeden. Wyjściem jest sygnał dyskretny o częstotliwości odpowiadającej częstotliwości trójkąta nośnego lub piły i długości impulsu proporcjonalnej do poziomu napięcia modulującego.
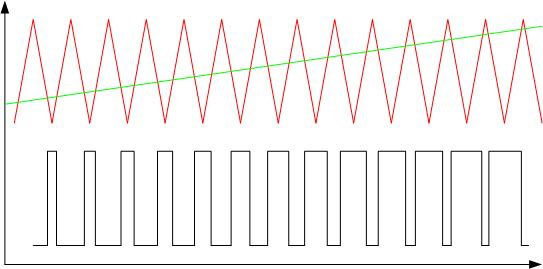
Na przykład modulacja szerokości impulsu sygnału trójkątnego wzrasta liniowo. Czas trwania impulsów wyjściowych jest proporcjonalny do poziomu sygnału wyjściowego.
Analogowe sterowniki PWM dostępne są również w postaci gotowych mikroukładów, wewnątrz których zainstalowany jest komparator i układ generowania nośnika. Dostępne są wejścia do podłączenia zewnętrznych elementów zadawania częstotliwości i podania sygnału informacyjnego. Sygnał jest usuwany z wyjścia sterującego potężnymi kluczami obcymi. Są też wejścia dla sprzężenia zwrotnego – są one potrzebne do utrzymania zadanych parametrów sterowania. Taki jest na przykład układ TL494. W przypadkach, w których moc konsumenta jest stosunkowo niewielka, dostępne są kontrolery PWM z wbudowanymi kluczami. Wewnętrzny klucz mikroukładu LM2596 jest przeznaczony do prądu do 3 amperów.
Metoda cyfrowa jest realizowana przy użyciu wyspecjalizowanych mikroukładów lub mikroprocesorów. Długość impulsu jest kontrolowana przez program wewnętrzny. Wiele mikrokontrolerów, w tym popularne PIC i AVR, posiada wbudowany moduł sprzętowej implementacji PWM „na pokładzie”, aby otrzymać sygnał PWM należy go aktywować i ustawić parametry jego pracy.Jeśli taki moduł nie jest dostępny, to PWM można zorganizować wyłącznie programowo, nie jest to trudne. Ta metoda daje większą moc i swobodę dzięki elastycznemu wykorzystaniu wyjść, ale wykorzystuje więcej zasobów kontrolera.
Charakterystyka sygnału PWM
Ważnymi cechami sygnału PWM są:
- amplituda (U);
- częstotliwość (f);
- cykl pracy (S) lub cykl pracy D.
Amplituda w woltach jest ustawiana w zależności od obciążenia. Musi zapewniać znamionowe napięcie zasilania konsumenta.
Częstotliwość sygnału modulowanego przez szerokość impulsu wybiera się z następujących rozważań:
- Im wyższa częstotliwość, tym wyższa dokładność sterowania.
- Częstotliwość nie może być niższa niż czas odpowiedzi urządzenia sterowanego przez PWM, w przeciwnym razie wystąpią zauważalne tętnienia kontrolowanego parametru.
- Im wyższa częstotliwość, tym wyższe straty przełączania. Wynika to z faktu, że czas przełączania klucza jest skończony. W stanie zablokowanym całe napięcie zasilania spada na kluczowym elemencie, ale prawie nie ma prądu. W stanie otwartym przez klucz przepływa prąd pełnego obciążenia, ale spadek napięcia jest niewielki, ponieważ rezystancja przepustowości wynosi kilka omów. W obu przypadkach rozpraszanie mocy jest znikome. Przejście z jednego stanu do drugiego następuje szybko, ale nie od razu. W procesie odblokowania-blokowania na częściowo otwartym elemencie spada duże napięcie i jednocześnie przepływa przez niego znaczny prąd. W tym czasie rozpraszana moc osiąga wysokie wartości. Ten okres jest krótki, klucz nie ma czasu na znaczne rozgrzanie.Ale wraz ze wzrostem częstotliwości takich odstępów czasu na jednostkę czasu staje się coraz więcej, a straty ciepła wzrastają. Dlatego do budowania kluczy ważne jest, aby używać szybkich elementów.
- Kiedy jedziemy silnik elektryczny częstotliwość musi być usunięta z obszaru słyszalnego dla człowieka - 25 kHz i więcej. Ponieważ przy niższej częstotliwości PWM pojawia się nieprzyjemny gwizdek.
Wymagania te często są ze sobą sprzeczne, więc wybór częstotliwości w niektórych przypadkach jest kompromisem.
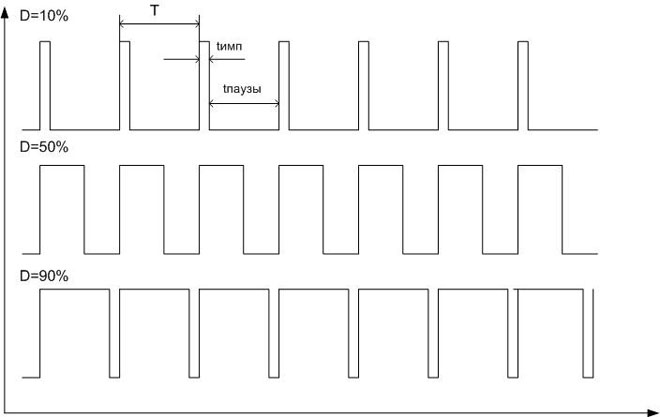
Wartość modulacji charakteryzuje cykl pracy. Ponieważ częstotliwość impulsów jest stała, czas trwania okresu jest również stały (T=1/f). Okres składa się z impulsu i pauzy o czasie trwania odpowiednio tchochlik oraz Tpauzuje, oraz Tchochlik+tpauzuje=T. Cykl pracy to stosunek czasu trwania impulsu do okresu - S \u003d tchochlik/T. Jednak w praktyce wygodniejsze okazało się zastosowanie wartości odwrotności - współczynnik wypełnienia: D=1/S=T/tchochlik. Jeszcze wygodniej jest wyrazić współczynnik wypełnienia w procentach.
Jaka jest różnica między PWM a SIR?
W zagranicznej literaturze technicznej nie ma różnicy między modulacją szerokości impulsu a regulacją szerokości impulsu (PWR). Rosyjscy specjaliści próbują odróżnić te pojęcia. W rzeczywistości PWM jest rodzajem modulacji, czyli zmian w sygnale nośnym pod wpływem innego, modulującego. Sygnał nośny działa jako nośnik informacji, a sygnał modulujący ustawia tę informację. A regulacja szerokości impulsu to regulacja trybu obciążenia za pomocą PWM.
Przyczyny i zastosowania PWM
Zasada modulacji szerokości impulsu jest stosowana w regulatory prędkości potężnych silników asynchronicznych. W tym przypadku sygnał modulujący o regulowanej częstotliwości (jednofazowy lub trójfazowy) jest generowany przez generator fal sinusoidalnych małej mocy i nakładany na nośną w sposób analogowy. Wyjściem jest sygnał PWM, który jest podawany na klawisze o wymaganej mocy. Następnie można przepuścić powstałą sekwencję impulsów przez filtr dolnoprzepustowy, na przykład przez prosty obwód RC, i wybrać oryginalną sinusoidę. Lub możesz się bez tego obejść - filtracja nastąpi naturalnie z powodu bezwładności silnika. Oczywiście im wyższa częstotliwość nośna, tym bardziej kształt fali wyjściowej jest zbliżony do pierwotnej sinusoidy.
Powstaje naturalne pytanie – dlaczego nie da się natychmiast wzmocnić sygnału generatora, np. przy użyciu potężnych tranzystorów? Ponieważ element regulujący działający w trybie liniowym będzie redystrybuować moc między obciążeniem a kluczem. W tym przypadku na kluczowy element marnuje się znaczna moc. Jeśli potężny element sterujący działa w trybie klucza (trinistor, triak, tranzystor RGBT), to moc rozkłada się w czasie. Straty będą znacznie mniejsze, a wydajność znacznie wyższa.
W technologii cyfrowej nie ma szczególnej alternatywy dla regulacji szerokości impulsu. Amplituda sygnału jest tam stała, napięcie i prąd można zmienić tylko poprzez modulację nośnika wzdłuż szerokości impulsu, a następnie uśrednienie go. Dlatego PWM służy do regulacji napięcia i prądu na tych obiektach, które mogą uśredniać sygnał impulsowy. Uśrednianie odbywa się na różne sposoby:
- z powodu bezwładności obciążenia.Tak więc bezwładność cieplna grzałek termoelektrycznych i żarówek sprawia, że w przerwach między impulsami regulowane obiekty nie wychładzają się zauważalnie.
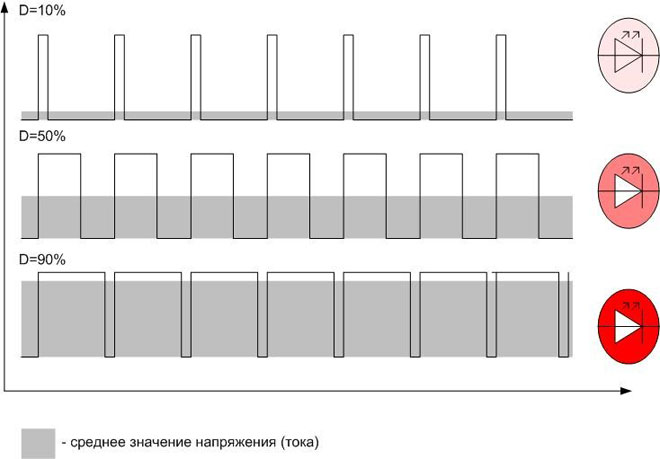
- Ze względu na bezwładność percepcji. Dioda LED ma czas, aby przejść z impulsu na impuls, ale ludzkie oko tego nie zauważa i odbiera to jako stałą poświatę o różnym natężeniu. Ta zasada służy do kontrolowania jasności punktów monitorów LED. Ale niezauważalne mruganie z częstotliwością kilkuset herców jest nadal obecne i powoduje zmęczenie oczu.
- z powodu bezwładności mechanicznej. Ta właściwość jest wykorzystywana w sterowaniu szczotkowymi silnikami prądu stałego. Przy odpowiednio dobranej częstotliwości regulacji silnik nie ma czasu na zwalnianie w martwych przerwach.
Dlatego PWM stosuje się tam, gdzie decydującą rolę odgrywa średnia wartość napięcia lub prądu. Poza wymienionymi typowymi przypadkami metoda PWM reguluje średni prąd w spawarkach i ładowarkach akumulatorów itp.
Jeśli naturalne uśrednianie nie jest możliwe, w wielu przypadkach rolę tę może przejąć wspomniany już filtr dolnoprzepustowy (LPF) w postaci łańcucha RC. Ze względów praktycznych to wystarczy, ale należy rozumieć, że nie można wyizolować oryginalnego sygnału z PWM za pomocą filtra dolnoprzepustowego bez zniekształceń. W końcu widmo PWM zawiera nieskończoną liczbę harmonicznych, które nieuchronnie wpadną w pasmo przenoszenia filtra. Dlatego nie należy budować złudzeń co do kształtu zrekonstruowanej sinusoidy.
Bardzo wydajne i skuteczne sterowanie LED PWM RGB. To urządzenie posiada trzy złącza p-n - czerwony, niebieski, zielony.Zmieniając osobno jasność poświaty każdego kanału, można uzyskać prawie dowolny kolor poświaty LED (z wyjątkiem czystej bieli). Możliwości tworzenia efektów świetlnych za pomocą PWM są nieograniczone.
Najczęstszym zastosowaniem sygnału cyfrowego z modulacją szerokości impulsu jest sterowanie średnim prądem lub napięciem przepływającym przez obciążenie. Możliwe jest jednak również niestandardowe zastosowanie tego typu modulacji. Wszystko zależy od wyobraźni dewelopera.
Podobne artykuły: